Skip to Content
Open Menu
Close Menu
Become A Sponsor
Donate For Worlds
Seasons
2026 Season
2025 Season
About
About Us
Mentors
Student Leadership
Our Sponsors
Contact Us
Team Resources
Tiger Time
Membership
Calendar
(
0
)
Cart
(
0
)
🎁 Donate
Become A Sponsor
Donate For Worlds
Seasons
2026 Season
2025 Season
About
About Us
Mentors
Student Leadership
Our Sponsors
Contact Us
Team Resources
Tiger Time
Membership
Calendar
(
0
)
Cart
(
0
)
🎁 Donate
Open Menu
Close Menu
Become A Sponsor
Donate For Worlds
Folder:
Seasons
Back
2026 Season
2025 Season
Folder:
About
Back
About Us
Mentors
Student Leadership
Our Sponsors
Contact Us
Folder:
Team Resources
Back
Tiger Time
Membership
Calendar
🎁 Donate
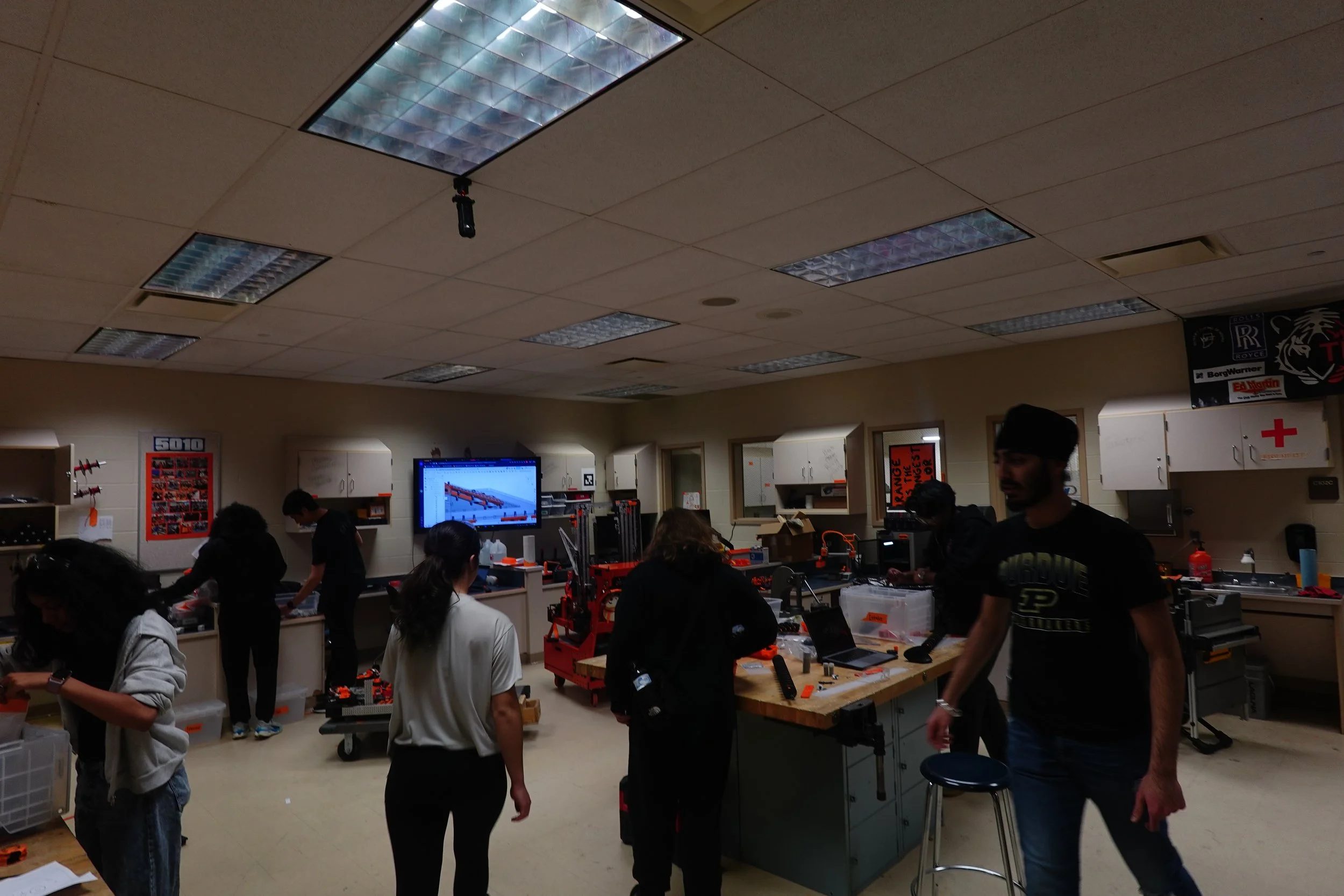
WE ARE TIGER DYNASTY